5月11日至12日,普渡机器人接连发布两项重要成果:具身智能大模型PuduFM 1.0,以及通用具身智能体平台PuduAgent。
PuduFM 1.0:三大核心技术维度
5月11日发布的PuduFM 1.0实现了对三维空间的深度感知与推理、面向未来的物理状态预测、在真实交互中持续进化的学习机制。
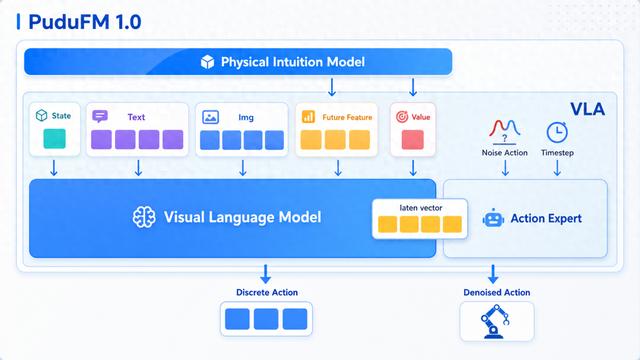
模型采用Physical Intuition Model与Vision-Language-Action深度耦合的架构。PIM专精于物理规律的隐式表征与建模,能够预判“杯子倾斜45度水会洒出”等物理结果,输出物理直觉特征与价值评估;VLA承担实时感知与精细控制,实现语言、视觉、动作三大模态在统一特征空间内的深度对齐。
模型采用三阶段训练法:预训练阶段利用海量互联网数据构建物理常识与多模态基础;第二阶段在World Simulator中进行强化学习打磨决策能力;第三阶段通过真实世界交互与人在环(Human-in-the-Loop)反馈持续迭代校准。
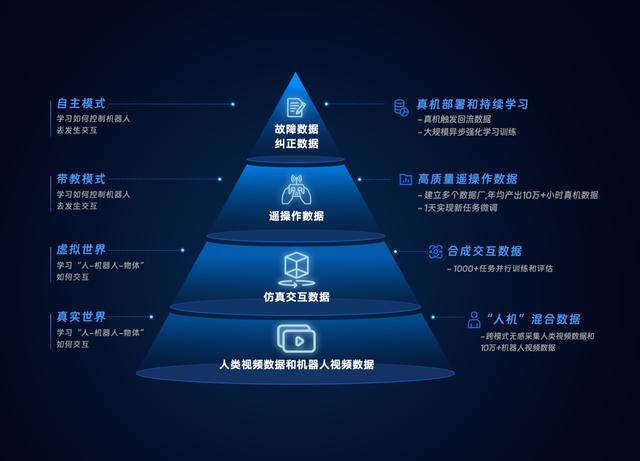
依托全球13万台商用机器人、覆盖80多个国家和地区,普渡每年积累3650万小时导航数据和1580万小时操作数据。其中导航数据为机器人第一视角的“亲历者记忆”,包含真实深度信息与空间尺度感;操作数据通过“无感采集”模式获取,操作人员日常工作即可完成数据收集。
PuduAgent:通用具身智能体平台
5月12日发布的PuduAgent是一个面向物理世界的通用具身智能体平台,包含三层架构:
系统层(PuduAgent OS)提供运行环境与认知基座。其中Agent Core是多尺度任务规划与动态调节反馈闭环的智能核心,能够在万平级复杂商业空间中完成跨楼层、超长程任务规划;Agent Memory引入工作记忆、情景记忆和记忆压缩抽象三层机制,解决长程任务中的目标漂移问题;Agent Runner确保感知、规划、控制在毫秒级延迟内完成闭环。
能力层(PuduAgent Skills)将导航、操作、交互等能力抽象为标准化的原子技能库,支持动态加载、跨形态适配和模型无关调度。
安全层(PuduAgent Safety)提供执行前的可行性判断、风险预判与异常干预机制。
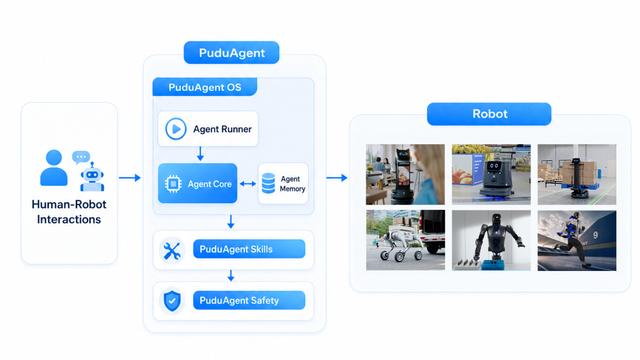
PuduAgent支持“一脑多形”,配送、清洁、工业、人形等不同形态机器人可共享同一套Agent Core与Agent Memory。同时支持群体协同,通过统一调度框架实现异构机器人的任务编排与协同作业。
平台面向全球开发者开放,提供SDK、仿真环境和SkillHub,开发者可贡献并商业化自己的技能模块。
文/广州日报新花城记者:阮元元
图/受访单位提供广州日报新花城
【来源:广州日报】
富灯网提示:文章来自网络,不代表本站观点。